On-chip Bio-micro/nanorobotic Swimmers
Scientific Leader : Gilgueng Hwang
Engineer : Laurent Couraud, Dominique Decanini
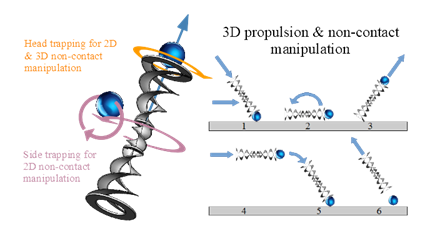
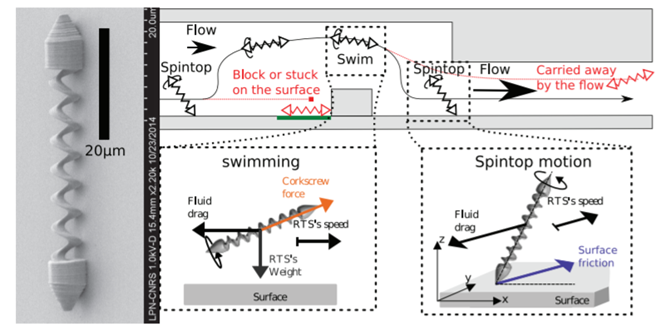
This topic of research is focusing on the development of micro/nanorobotic swimmers towards their biological applications such as mechanical cell manipulation and force sensing. This topic of research has started since 2010 and has been supported by various research contracts including two ANR projects (ANR NOMAD and NANOROBUST), Labex Nano-Saclay, C’NANO DIM Nano-K and JSPS. The results have been published in 40 international journals and conference proceedings. The technological enhancements have been demonstrated by winning 5 out of 7 times of participations to international mobile microrobotics challenges since 2010. On-chip integrated helical microswimmers have been developed [1]. And the system has been applied to measure mechancal force [2]. Their 3D motion control inside narrow microchannels under 2D imaging feedback has been achieved using the flux induced self-focusing helical trajectory in narrow channel [3]. Multiple helical microswimmers have been developed to be more robust in their visual feedback [4] and propulsion [5]. A stable 2D non-contact vortex trapping micromanipulation based on multiple helical microswimmers has also been demonstrated [6]. In addition, helical microswimmers with flow sensing were demonstrated to self-stabilize their motions under flow (Figure 4 top) [7]. Further optimizations of propulsion force for the gravity compensation were made to extend the non-contact manipulation in three-dimensions (Figure 4 bottom) [8]. The research axe has strong collaborations with international laboratory LIMMS, The University of Tokyo.
Related References :
[1] A. Barbot, D. Decanini, G. Hwang, “On-chip Microfluidic Multimodal Swimmer toward 3D Navigation”, Nature Sci. Rep., 6, 19041, DOI: 10.1038/srep19041, 2016
[2] A. Barbot, D. Decanini, G. Hwang, “Helical Microrobot for Force Sensing Inside Microfluidic Chip”, Sensors and Actuators: A. Physical, 266, pp. 258-272, 2017, doi.org/10.1016/j.sna.2017.09.004
[3] A. Barbot, D. Decanini, G. Hwang, “The Rotation of Microrobot Simplifies 3D Control Inside Microchannels”, Nature Scientific Reports, 2018, doi:10.1038/s41598-017-18891-w
[4] G. Hwang, D. Decanini, L. Laetitia, A-M. Gosnet-Haghiri, “On-chip Multifunctional Fluorescent-Magnetic Janus Helical Microswimmers”, AIP Rev. Sci. Instrum., 87, pp. 036104, 2016, DOI: 10.1063/1.4943259
[5] P. Serrano, D. Decanini, L. Leroy, L. Couraud, G. Hwang, “Multiflagella Artificial Bacteria for Robust Microfluidic Propulsion and Multimodal Micromanipulation”, Elsevier Microelectronic Engineering, 2018
[6] A. Paris, D. Decanini, G. Hwang, “On-chip multimodal vortex trap micro-manipulator with multistage bi-helical micro-swimmer”, Sensors and Actuators: A. Physical, 2018
[7] A. Barbot, D. Decanini, G. Hwang, "Local Flow Sensing on Helical Microrobot for Semi-Automatic Motion Adaptation", Int. J. Rob. Res., 39(4), 476–489., 2020
[8] A. Paris, D. Decanini, G. Hwang, "Swimming force characterizations of multistaged bi-helical microswimmer and 3D vortex trap manipulation", Microelectronic Engineering, Vol. 235, pp. 111466, 2021
